Griffin Addison
Hello! I am a Member of Technical Staff at DYNA Robotics. Previously, I was a Roboticist at Boston Dynamics AI Institute working on RL for Spot, as well as a Graduate Researcher at Kod*Lab where I full-stack designed then wrote whole-body control for an origami quadruped! I enjoy taking cutting edge research and deploying in an ultra-practical way.
resume linkedin github
griffin at alumni dot upenn dot edu

2025
Boston Dynamics AI Institute - Roboticist2024
Vivodyne - Robotics Engineerreinforcement learning via ppo: learning to walk
from-scratch implementation of proximal policy optimization w/ python, numpy, & pytorch in OpenAI Gym, MuJoCo
code
whole-body controller
dynamics-aware control of quadruped in C++, Eigen, MuJoCo
poster •
video •
code
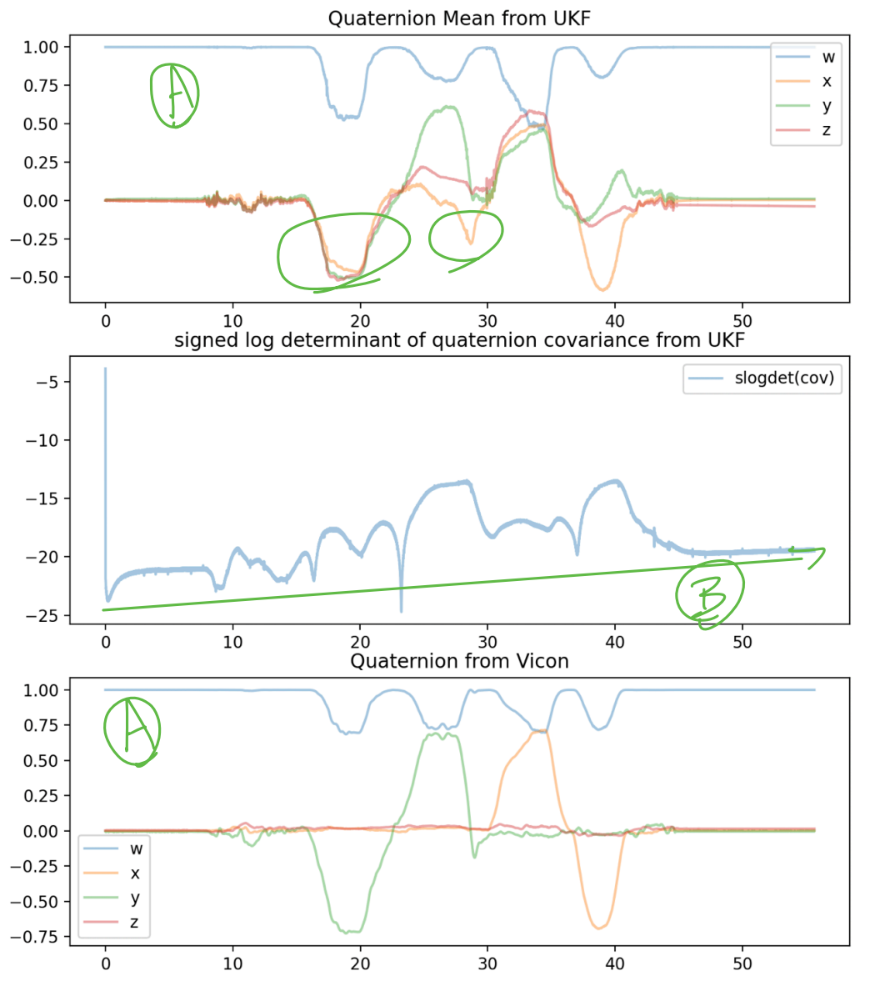
unscented kalman filter in python
from-scratch implementation of the unscented Kalman Filter on a 6-dof system w/ Python3, Numpy
code
dynamic origami quadruped (doq): design & control
full-stack kinematic and mechatronic design, C++ controls
★ ICRA 2023 Workshop
paper (coming soon)
autonomous racing: pure pursuit in ROS2
implementation of pure-pursuit planning & control for an RC car in C++, ROS2, Gazebo, RVIZ2
video •
code
automatic emergency braking from LiDAR scans in ROS2
ROS2 node that calcualtes time-to-collision based on raw LiDAR data, decides whether to halt
video •
code (private)
2023
Lucid Motors - Traction Control Software for the Airmultithreaded rendering & terrain generation
efficient real-time terrain generation in C++ w/ OpenGL and std::thread
code (private)
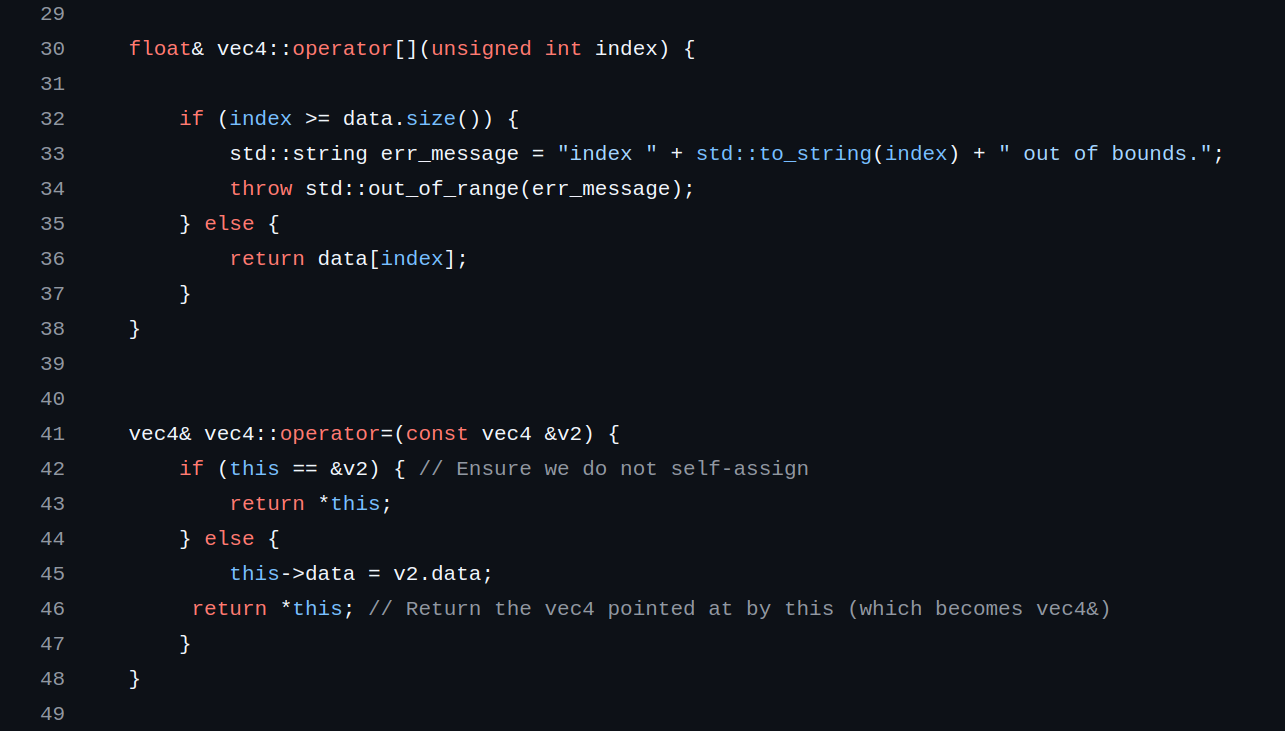
lightweight linear algebra library in C++
simple, speed-focused linear algebra library for interfacing with OpenGL
code (private)
half-edge C++ pointer mesh data structure
half-edge mesh data structure for efficient rendering w/ C++ raw, unique ptrs
code (private)
desktop graphical GUI application
written in QT & OpenGL for C++
code (private)
2022
Tesla - Battery Design for the CybertruckSuspension Lead @ Penn Electric Racing (FSAE)
design, manufacture, and testing of formula-style suspension
★ Design Finalist, 22/25 Score